什么是伺服��,伺服電機如何工作�?
伺服電機在各個行業(yè)的各種運動控制應(yīng)用中都很常見�,但這些設(shè)備是什么,以及它們與標準交流或直流電機有何不同��?
伺服電機是一種運動控制裝置���,其外觀與普通的直流/交流電機和驅(qū)動裝置非常相似����。然而��,仔細觀察�����,伺服電機在運動技術(shù)中起著特殊的作用�����,并且伺服驅(qū)動器比大多數(shù)簡單的電機驅(qū)動器需要更復(fù)雜的連接和編程。
那么這些電機是什么���?它們有何特別之處�?
簡而言之����,伺服電機是一種標準電機,其反饋裝置內(nèi)置在電機或輸出軸上��。匹配的放大器或驅(qū)動板將自動使用該反饋裝置來確定運動的準確性����。
工業(yè)VS。愛好伺服電機
首先���,讓我們先了解一下用于工業(yè)應(yīng)用的伺服系統(tǒng)與用于微控制器和遠程控制 (R/C) 項目等項目的伺服系統(tǒng)之間的一些區(qū)別�。基本定義相同��,但控制算法���、驅(qū)動技術(shù)和反饋單元有很大不同。
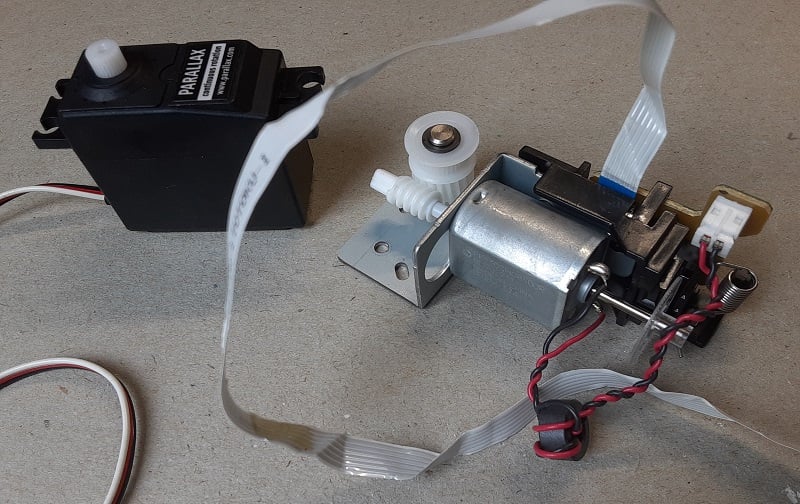
圖 1.兩個小型伺服電機,一個是業(yè)余愛好級(左)��,另一個(右)具有類似的組件����,但使用集成驅(qū)動器模塊上內(nèi)置的旋轉(zhuǎn)編碼器。圖片由作者提供
業(yè)余愛好級伺服電機通常是由來自微控制器的脈沖串或 PWM 信號供電的 3 線設(shè)備�。這并不與信號的 0-100% 占空比直接相關(guān),就好像我們正在驅(qū)動電機速度一樣�,而是反映了最小/最大速度范圍或固定角度目標位置之間的相對設(shè)定點。
在電機內(nèi)部�,一個小型集成電路 (IC) 將來自控制器的輸入信號與參考反饋設(shè)備進行比較。對于小型伺服系統(tǒng)���,這通常是一個小型電位器�����,在轉(zhuǎn)動時會改變其輸出電壓��。該 IC 向小型標準直流電機輸出電壓����,當電機轉(zhuǎn)動時��,電位器也會轉(zhuǎn)動,從而創(chuàng)建即時反饋回路�����。IC 可以根據(jù)電機與目標位置的匹配程度來增加或減少電機的輸出信號��。
如果此策略使人想起 PID 循環(huán)��、超調(diào)和穩(wěn)定時間的概念�,那么您是對的!這是伺服電機相對于標準電機驅(qū)動器的明顯優(yōu)勢(和復(fù)雜性)之一��。
事實上����,Arduino 或 R/C 項目上的愛好電機可能不依賴 PID 循環(huán),除非它是更高級的算法�����。
工業(yè)伺服電機
盡管這些電機的尺寸和規(guī)模通常較大�����,但總體概念非常相似��。標準直流或交流電機由伺服放大器(驅(qū)動器)提供電壓��。反饋裝置對于確保電機實際達到目標位置或速度仍然至關(guān)重要���。
在工業(yè)運動范圍內(nèi)��,反饋很可能是編碼器���,無論是增量式還是絕對式。

圖 2.小型工業(yè)級直流伺服電機��。圖片由作者提供
舵機有什么用��?
伺服系統(tǒng)可以在一些常見場景中為機器提供運動:
固定角度設(shè)定點
這在機器人手臂關(guān)節(jié)的范圍內(nèi)很容易識別��。任何 6 軸或 SCARA 機器人都將被命令到達某個位置����,并且必須以盡可能高的扭矩快速到達該位置,并且距離目標位置幾乎沒有超調(diào)�����。顯然�����,它也必須以令人難以置信的精確度到達固定位置。
這些要求迫使在每個關(guān)節(jié)處使用嚴格控制的伺服電機�����,并精心選擇正確的扭矩設(shè)置和非常精確的編碼器���。許多機器人使用絕對編碼器�,但如果使用增量編碼器��,電池模塊對于在電源循環(huán)期間保持位置至關(guān)重要���。
預(yù)設(shè)運動路徑
運動路徑����,也稱為運動曲線���,是電機最有趣的用途之一����。運動曲線比簡單的“連接點”要復(fù)雜得多��。與機器人教學非常相似,路徑中的每個運動都必須遵循特定的加速度�����、減速度��、最高速度�,甚至端點之間的速度變化�。
在純機械系統(tǒng)中,凸輪是不規(guī)則運動輪廓的驅(qū)動器�����,由固定 RPM 的旋轉(zhuǎn)盤的凸角決定�,轉(zhuǎn)換為線性運動。伺服系統(tǒng)可以取代編輯基于凸輪的運動系統(tǒng)的摩擦�����、維護和困難�。
目標轉(zhuǎn)速
盡管比運動分析更基礎(chǔ),但無論負載條件如何����,確保電機實際上以目標 RPM 運行都非常重要���。在普通的 VFD 或電機驅(qū)動器中,電壓的發(fā)送沒有反饋��。電機可能正在旋轉(zhuǎn)�,但隨著負載的增加,可能會以錯誤的速度旋轉(zhuǎn)���。驅(qū)動器上甚至可能沒有連接電機��!
在目標 RPM 情況下���,可以調(diào)整電壓或頻率以補償外部因素的許多影響。如果電機要以低得多的速度運行�,但我們想要更高的精度,則可以采用齒輪傳動來改變電機:編碼器速度的比率��,同時也可以減少負載機械慣性的影響���。
線性執(zhí)行器伺服系統(tǒng)
就像機械系統(tǒng)中凸輪將旋轉(zhuǎn)轉(zhuǎn)換為線性運動一樣���,線性執(zhí)行器依靠絲杠或滾珠絲杠或其他機構(gòu)將電機能量轉(zhuǎn)換為基于反饋的線性輪廓。
許多線性系統(tǒng)使用磁條編碼器或磁致伸縮位置傳感器來測量執(zhí)行器的精確延伸��,但電機上的編碼器也可以正常工作。編碼器的缺點是脈沖序列比傳感器的簡單 4-20 mA 輸出更難轉(zhuǎn)換��。輸入內(nèi)置編碼器反饋的伺服電機驅(qū)動器的優(yōu)勢��!

圖 3.伺服驅(qū)動器板(帶有真實的戰(zhàn)斗損壞)���,帶有電機和電源����、編碼器反饋�、信號和網(wǎng)絡(luò)的連接����。圖片由作者提供
如何使用伺服系統(tǒng)?
這是一個重要的問題��,但不幸的是�,由于制造商多種多樣,很難輕易回答���。大多數(shù)伺服系統(tǒng)使用 OEM 提供的配置軟件來設(shè)置驅(qū)動器�����,將其與電機相匹配����,并確定將接受哪些控制信號以及電機將如何驅(qū)動。
最后��,這比簡單的 VFD 或直流電機驅(qū)動器要復(fù)雜一些�,但有限控制和有關(guān)系統(tǒng)精度的知識所帶來的壓倒性優(yōu)勢可以大大超過這些更先進的運動控制設(shè)備的成本。